")
Sadržaj:
- Korak 1: Kako doza djeluje
- Korak 2: Imajte na umu Prije početka
- Korak 3: Prikupite sav materijal
- Korak 4: Variuos dimenzije
- Korak 5: Izrada tijela
- Korak 6: Sklop aktuatora i izrada ploča
- Korak 7: Priprema valnih karakteristika
- Korak 8: Elektroničke veze i program
- Korak 9: Upravljanje pokretačima pomoću programa koji pokreće izbornik
- Korak 10: Kako upravljati valovitim spremnikom
- Autor John Day day@howwhatproduce.com.
- Public 2024-01-30 09:36.
- Zadnja promjena 2025-01-23 14:47.



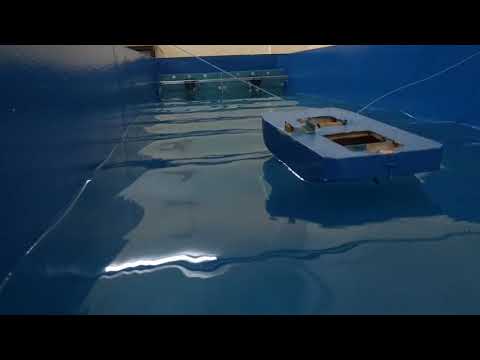
Spremnik s valovima laboratorijski je postav za promatranje ponašanja površinskih valova. Tipičan spremnik s valovima je kutija napunjena tekućinom, obično vodom, ostavljajući na vrhu otvoren ili zrak ispunjen prostor. Na jednom kraju spremnika aktuator stvara valove; drugi kraj obično ima površinu koja upija valove.
Obično ovi spremnici koštaju mnogo novca pa sam pokušao napraviti zaista jako jeftino rješenje za studente koji žele koristiti spremnik za testiranje svojih projekata.
Korak 1: Kako doza djeluje
Dakle, projekt se sastoji od dva aktuatora izrađena pomoću ekstruzije aluminija s v-utorom.
Na svaki pogon spojen je koračni motor, a oba motora se upravljaju istim pogonom koračnog motora tako da nema zaostajanja.
Arduino se koristi za upravljanje vozačem motora. Program koji se pokreće putem izbornika koristi se za unos arduiona spojenog preko računala. Ploče pokretača montirane su na portalni otvor s v-utorom koji će se kretati naprijed-natrag nakon pokretanja motora, a to pomicanje ploča naprijed-natrag generira valove unutar spremnika. Visina vala i duljina vala mogu se promijeniti promjenom brzine motor preko arduina.
Korak 2: Imajte na umu Prije početka

Nisam opisao većinu malih stvari kako koristiti arduino ili kako zavarivati kako bi ovaj vodič bio mali i jednostavan za razumijevanje. Većina stvari koje nedostaju bit će izbrisane na slikama i video zapisima. Molimo vas da mi pošaljete poruku ako ima problema ili pitanja u vezi projekta.
Korak 3: Prikupite sav materijal
- Arduino mikrokontroler
- 2*Step motor (2,8 kgcm obrtnog momenta po motoru)
- 1*Upravljački program koračnog motora
- Portalni sustav s 2*V utora
- Čelične ili željezne ploče za tijelo spremnika
- L-ukrućenja za podupiranje tijela
- Vlakna ili plastični lim za izradu aktuatorske ploče
- Žice 48 V DC napajanje
Nisam uključio materijale za v-slot portalne vrata jer će popis biti vrlo velik, a zatim samo google v-slot dobit ćete mnogo video zapisa o tome kako ga sastaviti. Koristio sam ekstruziju aluminija 2040. Kapacitet motora i kapacitet napajanja promijenit će se ako želite nositi veće opterećenje.
Dimenzije spremnika
Duljina 5,50 m
Širina 1,07 m
Dubina 0,50 m
Korak 4: Variuos dimenzije



Kako bih pojednostavio stvari, a vodič skratio, snimio sam slike različitih komponenti u ljestvici tako da možete vidjeti njihove veličine.
Korak 5: Izrada tijela




Tijelo je izrađeno od lima debljine 3 mm.
Širina spremnika je 1,10 metara, duljina 5 metara i visina 0,5 metara.
Tijelo spremnika izrađeno je od blagog čelika sa ukrućenjima oko njega gdje god je to potrebno. Ploče od blagog čelika savijene su i izrezane na različite dijelove prema dimenzijama spremnika. Ti su dijelovi tada podignuti njihovim zavarivanjem. Učvršćivači su također zavareni kako bi konstrukcija bila jača.
Prva ploča je savijena u željenu veličinu u različitim presjecima, a zatim su ti dijelovi zavareni kako bi se podiglo tijelo. Dodani su elementi ukrućenja jer su dimenzije ukrućenja nosača prikazane na slici
Korak 6: Sklop aktuatora i izrada ploča



Pokretači su izrađeni pomoću v-slot sustava. Oni su stvarno jeftini i laki za izradu. Možete google na mreži kako sastaviti jedan od ovih. Upotrijebio sam olovni vijak umjesto remenskog pogona za povećanje nosivosti. Nisam uključio vodič za montažu jer će se promijeniti ovisno o opterećenju koje želite nositi. Za mene je opterećenje pri najvećoj brzini bilo oko 14 kg.
Pokretna ploča izrađena je od frp lima, može se koristiti i akril. Okvir od nehrđajućeg čelika izrađen je za podupiranje frp lima.
Okvir za veslanje
Okvir vesla izrađen je od nehrđajućeg čelika. Nehrđajući čelik vodootporan je i otporan je na koroziju. Za okvir vesla korišten je kvadratni presjek 2 x 2 cm. Čvrsti okvir bio je neophodan jer će tijekom ciklusa stvaranja vala djelovati mnogo cikličkog opterećenja. Čelični okvir se neće savijati pa će generirati pravilan sinusoidni val.
Izrađena je prilagođena L-stezaljka za povezivanje aktuatorske ploče s portalnom pločom na vslot sustavu.
Korak 7: Priprema valnih karakteristika



Spremnik može generirati različitu visinu vala prema zahtjevu. Za generiranje različite visine valova podešava se broj okretaja motora. Kako bi se postigla velika visina vala, okretaj motora se povećava, ali se smanjuje i valna duljina vala. Slično za povećanje broja okretaja valne duljine motora se smanjuje. RPM se može podesiti odabirom prilagođene opcije RPM -a iz izbornika.
Maksimalni broj okretaja u minuti = 250
Minimalni broj okretaja u minuti = 50
Ispod je primjer različite visine valova zabilježen akcelerometrom. Prva slika su podaci snimljeni pri velikom broju okretaja, što rezultira visokom visinom vala. Druga slika prikazuje smanjenu visinu vala i povećanu valnu duljinu grafikona, što je podatak zabilježen akcelerometrom i predstavlja stvarne valne karakteristike generiranog vala.
Korak 8: Elektroničke veze i program

Prilikom povezivanja napajanja budite oprezni. Polaritet priključka spojite pozitivni terminal na pozitivan, a negativni na negativan. Spojite motor i upravljački program kao što je prikazano na slici. Nakon što su svi spojevi ispravni, spojite pinove mikrokontrolera (8, 9, 10 i 11) vozaču koračnog motora. Spojite mikrokontroler na računalo putem USB -a. Pokrenite Arduino IDE> Serijski monitor.
Program je uključen u vodič i sam po sebi objašnjava, koristi prekidač, a ako i druge izjave za rad. Vrlo je jednostavno da ga mogu razumjeti i srednjoškolci.
Evo veze google pogona do programa
Arduino upravljački program
Korak 9: Upravljanje pokretačima pomoću programa koji pokreće izbornik

Nakon što je mikrokontroler ispravno spojen na računalo, otvorit ćete sličan izbornik. Za odabir opcije samo upišite broj pored opcije i pritisnite enter
Primjer:-
Za odabir "Pokretanje pri najvećoj frekvenciji" upišite 1 i pritisnite enter.
Za zaustavljanje radnje upišite 0 i pritisnite enter.
Hitno zaustavljanje
Za zaustavljanje pogona pritisnite nulu “0” i unesite.
Za hitno zaustavljanje pritisnite reset na mikrokontroleru ili isključite napajanje.
Korak 10: Kako upravljati valovitim spremnikom

Ovaj tenk je napravljen kao dio mog velikog projekta. Spremnik je testiran za generiranje različitih pravilnih valova u stanju mora na glavi za skalirani model teglenice. Testiranje valnog toka bilo je uspješno. Ukupni troškovi razvoja ovog projekta bili su Rs. 81 000 (samo osamdeset jedna tisuća) u trajanju od dva mjeseca.
Za sva pitanja komentirajte.

Prva nagrada na natjecanju u vodi
Preporučeni:
DIY ARGB stalak za slušalice za igranje koristeći akril: 14 koraka (sa slikama)
")
DIY ARGB postolje za igračke slušalice s korištenjem akrila: Pozdrav svima, u ovom uputstvu pokazat ću vam kako izraditi adresibilno prilagođeno postolje za slušalice za vaše igračke slušalice pomoću LED dioda WS2812b (poznatih i kao neopikseli). Za to možete koristiti i RGB trake projekt. Taj opis nije stvaran
Izgradite svoj prvi IOT koristeći Arduino bez dodatnih modula: 5 koraka (sa slikama)
")
Izgradite svoj prvi IOT koristeći Arduino bez dodatnih modula: Svijet postaje sve pametniji svaki dan, a najveći razlog za to je evolucija pametne tehnologije. Kao tehnološki entuzijast sigurno ste čuli za izraz IOT koji znači Internet stvari. Internet stvari znači kontrolirati i hraniti
Minimalistički IoT sat (koristeći ESP8266, Adafruit.io, IFTTT i Arduino IDE): 10 koraka (sa slikama)
: 10 koraka (sa slikama)")
Minimalistički IoT sat (koristeći ESP8266, Adafruit.io, IFTTT i Arduino IDE): U ovom vodiču pokazujem kako možete napraviti minimalistički sat sinkroniziran s internetom. Testirao sam ga s dvije različite ploče zasnovane na ESP8266: Firebeetle i NodeMCU. Mikrokontroler dobiva trenutno vrijeme s Google poslužitelja i prikazuje ga na
Programabilni RGB LED sekvencer (koristeći Arduino i Adafruit Trellis): 7 koraka (sa slikama)
: 7 koraka (sa slikama)")
Programabilni RGB LED sekvencer (koristeći Arduino i Adafruit Trellis): Moji sinovi željeli su LED trake u boji da osvijetle njihove stolove, a ja nisam želio koristiti konzervirani RGB kontroler jer sam znao da će im dosaditi fiksni uzorci ti kontroleri imaju. Također sam mislio da će to biti izvrsna prilika za stvaranje
Obavijesti o događajima u stvarnom vremenu koristeći NodeMCU (Arduino), Google Firebase i Laravel: 4 koraka (sa slikama)
, Google Firebase i Laravel: 4 koraka (sa slikama)")
Obavijesti o događajima u stvarnom vremenu pomoću NodeMCU -a (Arduino), Google Firebase -a i Laravela: Jeste li ikada željeli biti obaviješteni kada se na vašoj web stranici izvrši neka radnja, ali e -pošta ne odgovara? Želite li čuti zvuk ili zvono svaki put kada prodajete? Ili postoji hitna potreba za hitnom pomoći