: 5 koraka")
Sadržaj:
- Autor John Day day@howwhatproduce.com.
- Public 2024-01-30 09:37.
- Zadnja promjena 2025-01-23 14:47.


Dobrodošli u novi projekt !!!
Prvo sam zaista želio napraviti neke jezive oči kao što to rade za kostime i Noć vještica. Volim specijalne efekte i želio sam naučiti i izgraditi vlastite animatronske oči koristeći arduino, servo i loptice za ping pong.
Korak 1:
Prikupite potrepštine…
2 servo motora (išao sam s najjeftinijim mogućim u trgovini Hobby Town)
arduino uno (adafruit)
klipnjače (Hobby Town)
2 poluosovine (Hobby Town)
2 loptice za stolni tenis
priključci (Hobby Town)
Glava stiropora (Michaels)
ostale razne stavke …
Korak 1: Korak 2: Slikanje očiju


Za korak 2 želio sam nastaviti slikati očne jabučice što sam i sam napravio. Da, malo su skinuti, ali izdaleka izgledaju sjajno! Ako imate pitanja o tome koju sam boju koristila, komentirajte ispod i pitajte:)
Izrada očiju:
Potrebni materijali:
4 male tanke četke za boje
boja
papirnati ručnik
Da biste napravili oči, počnite s dvije loptice za stolni tenis i iskreno ih samo prepolovite egzaktnim nožem ili rezačem za kutije. Zatim ih prvo obojite bijelom podlogom kako biste sakrili sve nedostatke. Nakon toga počnite nanositi boju oka koju pokušavate postići. Za svoje sam koristio zelenu i plavu. Moja paleta boja bila je zelena, plava, bijela i crna.
Korak 2: Korak 3: Sastavljanje baze


Korak 3: Sastavljanje baze
Potrebni materijali:
akrilne ploče
slučajni komad metala
vijci
pola vratila
tračna pila (nije potrebna)
Prvo sam iz akrilnog lima izrezala željeni oblik i veličinu. Zatim sam izrezao metalne nosače samo iz starog komada metala. Nakon što sam ih stigao tamo gdje sam ih želio, izbušio sam rupe za vijke i spojio držače s podnožjem kao što je prikazano gore na slici. Za jedan od mojih servomotora morao sam izrezati mali pravokutni oblik kako bih bio siguran da se tamo uklapa. To je trebalo osigurati da su veze i sve ispravno usklađeni.
Korak 3: Korak 4: Postavljanje servo upravljača i veza



Korak 4: Postavljanje servo upravljača i veza
Potrebni materijali:
2 serva
povezivanja
mali izrezani akrilni kvadrati
vijci
priključci
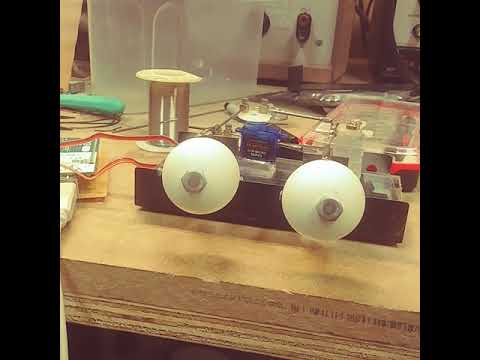
Za korak 4 postavio sam gdje će sve ići i postavio ga. Kako bih bio siguran da sve sjedi ravnomjerno i poučeno, morao sam staviti male izrezane komade akrila ispod jednog od servomotora. Morao sam staviti istu količinu komada ispod spojke koja povezuje oko sa servom. Nakon što su ovo sva mjesta i zalijepite ih (što god vaš izbor mogao biti sve dok se lijepi), možete spojiti oči s vezama i servomotorima. Ovo izbliza prikazano je gore na slici 4. Samo jedna sporedna napomena pri postavljanju servo -a i povezivanja servo -a najbliže očima mora biti podignuta gore, kao i veza neposredno uz njega. To je zato što jedan vuče osi x, a drugi vuče osi y. Ovo je najveći korak i neke će stvari možda trebati prilagoditi čak i nakon što sve završite s povezivanjem.:)
Korak 4: KOD KORAK


Dodavanje koda u arduino !! Gore se nalaze slike koda koji se koristi za ove oči. Dodao sam joystick iz PS1 kontrolera da bude način na koji se kontroliraju oči.
Korak 5: Korak 5: Glava




Ovaj korak nije obavezan i zahtijeva vrijeme.
Korak 5: Izrada glave
Potrebni materijali
Glava od stiropora
točan nož
pištolj za vruće ljepilo
Sada za ovaj korak nije obavezan i trebalo je vremena. Vjerojatno mi je trebalo 2 sata. Nažalost, moj partner u zločinu slučajno je odustao od projekta i slomio glavu nakon što sam završio. U svakom slučaju za ovo sam samo shvatio koliko duboko trebam izrezati odozdo, kao i vrh. Najvažniji dio su oči koje trebaju dovoljno prostora za kretanje i kretanje u krug, kao što možete vidjeti na fotografiji 5. Akrilna baza koju sam odlučila učiniti stršila je sa strane, kao što možete vidjeti na fotografiji 6. To vam može pokriti štitnike za uši ili nešto smiješno poput perike!
Onda TADDAAAAA !!!!!! potpuno ste gotovi s ovim projektom.
Nadam se da vam se ovo sviđa i komentirajte u nastavku ako imate pitanja ili bilo što, samo pitajte:)
Preporučeni:
3D robotska ruka s koračnim motorima s Bluetooth kontrolom: 12 koraka

3D robotska ruka s koračnim motorima s Bluetooth kontrolom: U ovom ćemo vodiču vidjeti kako izraditi 3D robotsku ruku, s 28byj-48 koračnim motorima, servo motorom i 3D ispisanim dijelovima. Tiskana ploča, izvorni kod, električni dijagram, izvorni kod i mnogo informacija nalaze se na mojoj web stranici
Upravljanje istosmjernim motorima s Arduinom i L293: 5 koraka (sa slikama)
")
Upravljanje istosmjernim motorima pomoću Arduina i L293: Jednostavan način upravljanja istosmjernim motorima. Sve što trebate je znanje o elektronici i programiranju. Ako imate pitanja ili problema, možete me kontaktirati na moj mail: iwx.production@gmail.com Posjetite moj youtube kanal: https : //www.youtube.com/channel/UCuS39O01OyP
Mecanum Omni Wheel Robot sa GRBL koračnim motorima Arduino štit: 4 koraka

Mecanum Omni Wheels Robot sa GRBL koračnim motorima Arduino Shield: Mecanum Robot - projekt koji sam želio izgraditi otkad sam ga vidio na Dejanovom blogu mehatronike pohvale: howtomechatronics.com Dejan je zaista napravio dobar posao pokrivajući sve aspekte od hardvera, 3D ispisa , elektronika, kôd i aplikacija za Android (MIT
Roka za ruke 6 osi DIY (sa koračnim motorima): 9 koraka (sa slikama)
: 9 koraka (sa slikama)")
DIY Robot Arm 6 Axis (with Stepper Motors): Nakon više od godinu dana studija, prototipova i raznih kvarova uspio sam izgraditi željeznog / aluminijskog robota sa 6 stupnjeva slobode kojim upravljaju koračni motori. Najteži dio bio je dizajn jer Htio sam postići 3 temeljna cilja
Ruka robota s servo motorima s upravljanjem Fpga - Digilent natjecanje: 3 koraka

Ruka robota s servo motorima s upravljanjem Fpga - Digilent natjecanje: ruka robota sa servo motorom s upravljanjem FPGA -a Cilj ovog projekta je stvoriti programabilni sustav koji može izvesti operacije lemljenja na perf ploči. Sustav se temelji na razvojnoj ploči Digilent Basys3 i moći će lemiti zajedno